. DOI: 10.1002/sstr.202400245")
A research team has unveiled an innovative technology for ultraprecision surface polishing and cleaning using simultaneously operating magnetic micro spinbots. These tiny robots, capable of nanometer-scale contaminant removal and polishing, offer a lightweight, scalable, and cost-effective alternative for advanced industries like semiconductors and optics.
The team’s findings have been published in the journal Small Structures, where they highlight the potential of magnetic soft robots to revolutionize precision manufacturing. The researchers were led by Professor Sanha Kim from the Korea Advanced Institute of Science and Technology (KAIST) and Professor Jeong Jae (JJ) Wie from the Hanyang University.
In the production of high-density semiconductors, achieving ultra-low surface roughness on metal layers is crucial for device performance. Even minor imperfections can lead to defects that degrade the efficiency and reliability of electronic components.
Additionally, ensuring that surfaces are free from contaminants during the manufacturing process is essential to avoid introducing particles that can compromise functionality of devices. To meet these stringent requirements, ultraprecision polishing and cleaning technologies have become key components in semiconductor fabrication.
Traditional methods, such as chemical–mechanical planarization (CMP) and post-CMP cleaning systems, have been the industry standard for surface planarization and contaminant removal. However, these systems come with significant drawbacks. CMP equipment is not only large and complex but also extremely expensive, making it difficult to scale or upgrade.
Moreover, the consumables used in these processes, such as polishing pads, abrasive slurry and cleaning brushes, are costly and need frequent replacement, driving up operational expenses. This combination of high upfront costs and ongoing maintenance requirements poses a major challenge for manufacturers aiming to reduce production costs while improving yield.
Addressing these challenges, the research team developed “spinbots,” microrobots driven by external magnetic fields that perform ultraprecision surface polishing and cleaning. The spinbots, made from thermoplastic polyurethane–Fe3O4 nanocomposite, are controlled by a magnetic stirrer, creating a rotating magnetic field.
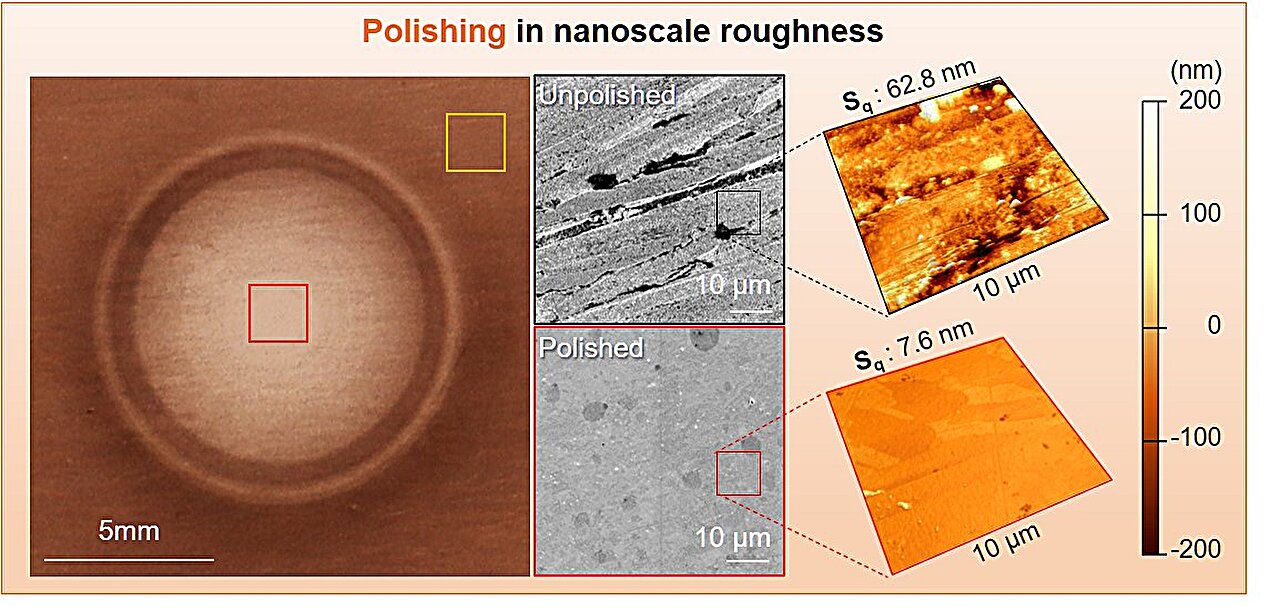
This setup, while much smaller and simpler than traditional equipment, enables the spinbots to autonomously rotate and pivot across surfaces, achieving a remarkable cleaning efficiency of 99.6% when removing nanometer-sized contaminants. In addition to their cleaning capabilities, these robots can polish surfaces to an astonishing smoothness, reaching roughness levels as low as average roughness (Ra) 1.8 nm.
What makes this technology truly groundbreaking is its ability to operate multiple spinbots simultaneously. Up to 42 spinbots were shown to work together on three vertically stacked wafers, offering unprecedented scalability and efficiency in surface engineering. Despite its small scale, the spinbot system is 1,000 times lighter than conventional polishing tools, yet delivers comparable or even superior results.
Moreover, the spinbots are capable of performing three-body abrasion polishing. In this process, hard silica particles are captured between the spinbot and the surface being polished, gradually removing material with nanometer-level precision. This method produces a mirror-smooth finish, rivaling state-of-the-art techniques like ion beam polishing and magnetorheological polishing, but at a fraction of the cost and equipment size.
. DOI: 10.1002/sstr.202400245")
One of the key advantages of spinbot technology is its sustainability. Traditional polishing and cleaning methods require large amounts of energy and often use hazardous chemicals. In contrast, the spinbots are powered by a magnetic field, eliminating the need for such chemicals and reducing the environmental impact. Additionally, the robots are reusable, further enhancing the sustainability of the technology.
The research team envisions a future where spinbot technology is integrated into automated production systems, offering ultraprecision manufacturing capabilities at a lower cost and with minimal environmental impact. This breakthrough represents a significant step toward autonomous manufacturing, where these microrobots could be used in applications ranging from semiconductors to optics and beyond.
More information:
Hyeongmin Je et al, Spatially Selective Ultraprecision Polishing and Cleaning by Collective Behavior of Micro Spinbots, Small Structures (2024). DOI: 10.1002/sstr.202400245
Provided by
Hanyang University
Citation:
Magnetic micro spinbots can perform ultraprecise surface polishing and cleaning (2024, September 20)
retrieved 20 September 2024
from https://phys.org/news/2024-09-magnetic-micro-spinbots-ultraprecise-surface.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.