
Exploring the moon has become increasingly more of a focal point lately, especially with a series of landers recently launched with various degrees of success. One of the difficulties those landers and any future human missions face is understanding the terrain they are landing on and potentially traversing in the case of a rover or human. To help fight this problem, a team of researchers from Switzerland has developed a drone concept that could help map out some of the more interesting, potentially hazardous areas to explore on the moon.
Mapping the moon has already been a priority for years. However, some of the more exciting regions, such as the Permanently Shadows Regions (PSR) at the lunar poles that hold a significant amount of water ice, have only been mapped to a resolution of about 1m per pixel in the best images of them. That’s including artificial enhancement by AI-backed algorithms.
That level of resolution isn’t near enough to provide useful planning data for any potential rover or human missions—a given rover’s wheel itself won’t even more that in width, let alone hope to traverse an obstacle of that size. Consequently, any rovers we send must be manually controlled or make their way very slowly and autonomously. Given the limited operational timeline of these expected rover missions, that slow pace could limit their ability to search out the valuable resources and sites that scientists think are hiding in the PSRs.
The obvious solution to this problem is to have another form of robot serve as a scout, similar to what Ingenuity had been doing for the Perseverance rover on Mars up until recently. That collaboration had allowed Perseverance to set the record for longest single-day autonomous drive on another planet—totaling about 700 m. If a scout were able to map out details of the lunar surface in front of a potential rover, it could move even faster than the pace set by Perseverance.
To this end, there have been plenty of planned missions to do just that. In a recent paper published in Acta Astronautica describing their idea, Romeo Tonasso and his colleagues at the Ecole Polytechnique Federale de Lausanne split these existing mission concepts into two categories—large and small.
Larger systems can contain tested, off-the-shelf chemical propulsion systems that, when flight-tested, can be bulky and use potentially hazardous chemicals. Smaller systems could use different forms of chemical propulsions, such as H2O2 rockets, or even more mundane means of locomotion, such as by literally jumping off the ground using legs. However, many of the technologies for that type of propulsion aren’t yet at a high enough development level for use in a practical mission.
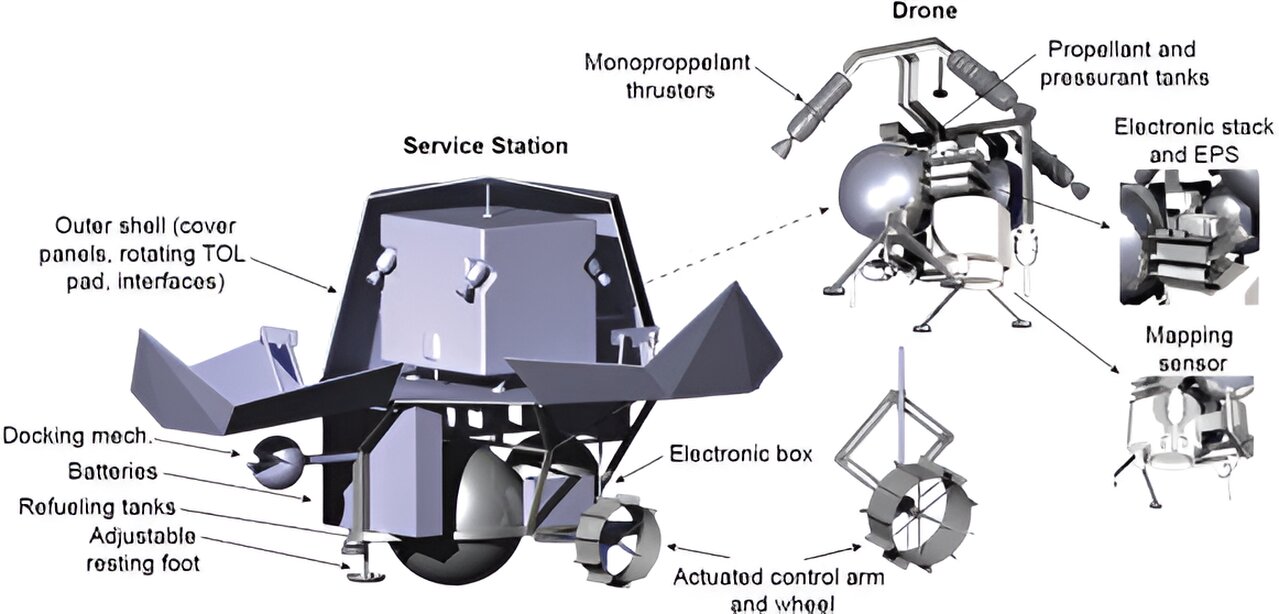
Finding a middle ground between the older, heavier hopper model and the newer, untested one was one of the leading design constraints for the new concept. The solution they came up with was a rocket-propelled drone that would be launched from and return to a base station that could be towed by a rover or other lunar exploration vehicle.
The base station would refuel the drone after each flight, allowing it to make multiple flights while not carrying excess propellant weight. With this setup, the system could map as many as 9 square kilometers of the lunar surface at a resolution that would be helpful for both rover and human mission planning. At the end of that effort, the base station would have to be refueled, allowing it to continue its mission, which is a central part of the design concept.
This idea has other advantages—many other hoppers have to land on the ground, and their propulsion system can introduce a significant amount of chaos into the lunar environment. That is especially undesirable if the surface they’re landing on happens to contain commercially viable materials such as water ice. Landing back at a mobile docking station also eliminates any dust kick-up, which can significantly hinder operations in an area, given how long it takes dust to settle on the moon.
While there are some details in the paper, including some high-level architecture discussion that uses space-tested hardware, so far, this idea is just a concept. However, with the date of the Artemis III human landing approaching quickly, NASA and other space agencies would undoubtedly benefit from a successful scouting mission such as the one described in the paper. Whether or not they will push the idea across the finish line remains to be seen, though.
More information:
Roméo Tonasso et al, A lunar reconnaissance drone for cooperative exploration and high-resolution mapping of extreme locations, Acta Astronautica (2024). DOI: 10.1016/j.actaastro.2024.02.006
Provided by
Universe Today
Citation:
Drones could help map the lunar surface with extreme precision (2024, March 8)
retrieved 8 March 2024
from https://phys.org/news/2024-03-drones-lunar-surface-extreme-precision.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.

